

![日本富士XD系列膠片- [原裝進(jìn)口]日本富士XD系列工業(yè)射線探傷膠片](https://fcdn.goodq.top/caches/d78610108a099a3552b6f49d921df766/aHR0cHM6Ly93d3cuY2hpbmFuZHRtYXJrZXQuY29tL3FmeS1jb250ZW50L3VwbG9hZHMvMjAyNS8wMS9lYTQwMzk3Y2VjOWNhZGU5Y2M5YmJjYzI0Y2RkNWUxNC0xNTB4MTAwLmpwZw_p_p100_p_3D_p_p100_p_3D.jpg "日本富士XD系列膠片-[原裝進(jìn)口]日本富士XD系列工業(yè)射線探傷膠片")
發(fā)布日期:2025-01-25
相控陣超聲檢測(cè)標(biāo)準(zhǔn)試塊校驗(yàn)介紹及用法
相控陣超聲檢測(cè)標(biāo)準(zhǔn)試塊校驗(yàn)介紹及用法
來(lái)源:
發(fā)布日期:2021-01-20 17:05
摘要
本文介紹相控陣超聲檢測(cè)(PAUT)用ISO(國(guó)際標(biāo)準(zhǔn)化組織)最新校驗(yàn)試塊,概述試塊的基本特點(diǎn)和主要功能。
近些年相控陣超聲檢測(cè)(PAUT)在國(guó)內(nèi)外發(fā)展迅速,在工業(yè)上已經(jīng)廣泛應(yīng)用。
有關(guān)相控陣超聲檢測(cè)(PAUT)的方法標(biāo)準(zhǔn)已及時(shí)推出,但涉及用什么試塊來(lái)校驗(yàn)PAUT系統(tǒng)國(guó)內(nèi)還是比較混亂,不同的操作者,多用不同方法進(jìn)行PAUT校驗(yàn)。
實(shí)驗(yàn)證明ISO2400試塊不能滿足所有PAUT校驗(yàn)要求。
為此,IIW (國(guó)際焊接學(xué)會(huì))VC分會(huì)為相控陣檢測(cè)設(shè)計(jì)新的校驗(yàn)試塊。此校驗(yàn)試塊將作為國(guó)際新標(biāo)準(zhǔn)ISO19675發(fā)布(ISO2400繼續(xù)有效),發(fā)布日期2017-01。
1.PAUT IIW試塊立項(xiàng)起源
由于IIW試塊不能滿足所有PAUT校驗(yàn)要求,第V委員會(huì)啟動(dòng)專為PAUT設(shè)計(jì)校驗(yàn)試塊的項(xiàng)目。
第V委員會(huì)的工作組由來(lái)自多國(guó)的代表組成,從2010年開(kāi)始,大致活動(dòng)了5年,大部分工作均通過(guò)基于互聯(lián)網(wǎng)的會(huì)議用電子方式完成。
2.PAUT試塊立項(xiàng)開(kāi)發(fā)
立項(xiàng)背景和目的初始工作專注于規(guī)定立項(xiàng)范圍和目標(biāo)。
本專題立項(xiàng)目的是:設(shè)計(jì)出既實(shí)用又價(jià)廉的相控陣校驗(yàn)試塊,其基本校驗(yàn)作用能滿足各國(guó)多行業(yè)需要、且符合現(xiàn)行標(biāo)準(zhǔn)要求。
PAUT的基本校驗(yàn)是:材料聲速校驗(yàn),楔塊延時(shí)校驗(yàn),角度校正增益校驗(yàn)
該試塊其他要求:
需輕便,性價(jià)比高,滿足國(guó)際法規(guī)要求;
能按其他ISO標(biāo)準(zhǔn)規(guī)定校核相控陣探頭;
能讓買主快速、簡(jiǎn)單校核、確認(rèn)試塊超聲特性符合要求。
3.1設(shè)計(jì)四歷程
試塊型式的設(shè)計(jì)經(jīng)歷了以下四步(圖2):
a)最先送VC分委會(huì)的提議由能源行業(yè)提出,試塊高度為50mm;
b)很快又決定將試塊高度從50mm增至100mm;
c)設(shè)計(jì)成兩個(gè)斜坡,聲束測(cè)量可從試塊三向進(jìn)行;
d)完成最終設(shè)計(jì)型式,打上刻度標(biāo)記。


(圖2 PAUT試塊設(shè)計(jì)四歷程)

(圖3 ISO19675:2017采納的PAUT校驗(yàn)試塊型式)
粗看,PAUTIIW試塊頗似原IIW常規(guī)UT試塊,但可進(jìn)行的特性校核和校驗(yàn)功能要多得多。
工作組借助于仿真建模,大大加速了新試塊的設(shè)計(jì)確認(rèn)。
3.2 仿真建模
ISO19675:2017的PAUT校驗(yàn)試塊是首次使用超聲波束仿真建模軟件設(shè)計(jì)的第一個(gè)超聲校驗(yàn)試塊。
這樣就大大加速了新試快的設(shè)計(jì)速度,對(duì)試塊標(biāo)準(zhǔn)反射體的定位,避免產(chǎn)生假信號(hào),校驗(yàn)時(shí)無(wú)干擾回波,確定試塊的外部尺寸都起到了很大的作用。
CIVATM用于該項(xiàng)工作,它是由法國(guó)CEA開(kāi)發(fā)的軟件。
CIVATM是精細(xì)的全聲束傳播模型,它用的半解析法,基于脈沖響應(yīng)函數(shù)的綜合,可模仿缺陷相互作用,也可作各向異性3D仿真。
上圖,用垂直分布的橫孔模擬聲波反應(yīng),以確保對(duì)S掃作快速校驗(yàn)校核,而無(wú)干擾回波
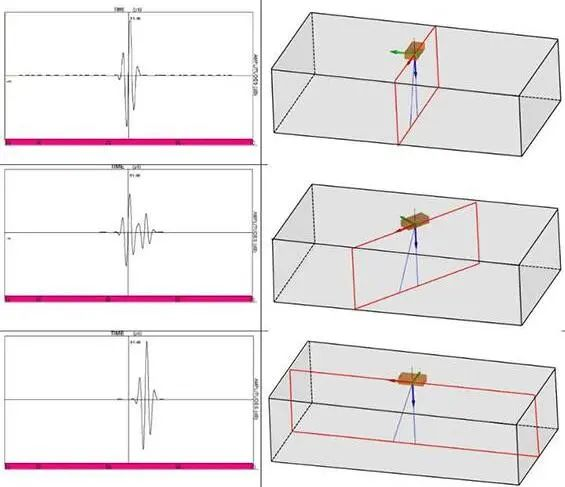
上圖,在一個(gè)位置偏轉(zhuǎn)探頭,模仿聲波在各向異性介質(zhì)中的雙折射現(xiàn)象。
4.PAUT校驗(yàn)試塊用法

4.1 ISO19675:2017概述
在ISO 19675 中列入兩個(gè)附錄,以使操作者快速了解 PAUT新試塊的適當(dāng)用法。
附錄A是規(guī)范性附錄,說(shuō)明材料各向異性測(cè)評(píng)方法,指導(dǎo)試塊制作者如何測(cè)定聲速(這些數(shù)值要求列入隨同試塊提供給用戶的技術(shù)文件中,以供操作者驗(yàn)證驗(yàn)收用)。
附錄B是參考性附錄,目的是比較PAUT校驗(yàn)試塊與ISO2400試塊(即比較IIW新老試塊),并簡(jiǎn)單說(shuō)明其他一些可能用法,如PA探頭楔塊延時(shí)測(cè)評(píng)、珊瓣測(cè)評(píng)、活陣元測(cè)評(píng)、靈敏度均衡、數(shù)據(jù)測(cè)繪校驗(yàn)、相控陣元配置等。
4.2 各向異性校驗(yàn)
ISO19675中的PAUT校驗(yàn)試塊,只要其材料、熱處理和表面光潔度均滿足要求,各向異性不應(yīng)相關(guān)(意即材料聲速、聲衰減應(yīng)呈各向同性),測(cè)定的聲速宜在標(biāo)準(zhǔn)提出的范圍之內(nèi),即:
縱波聲速為5920m/s±30m/s,橫波聲速為3255m/s±15m/s。
該P(yáng)AUT試塊型式的最大優(yōu)點(diǎn)是,能讓試塊買主通過(guò)簡(jiǎn)單測(cè)試,快速驗(yàn)證其是否符合標(biāo)準(zhǔn)要求。實(shí)際上,從三個(gè)正交方向就可快速測(cè)定試塊聲速。
測(cè)評(píng)時(shí)要用縱波直探頭和橫波直探頭。選用探頭應(yīng)為寬帶,直徑不大于12.5mm。應(yīng)使用適當(dāng)耦合介質(zhì)。將探頭置于圖4所示三個(gè)位置,時(shí)間讀數(shù)應(yīng)在底面回波和第一個(gè)多次回波間取值。
用橫波直探頭測(cè)取讀數(shù)時(shí),探頭要旋轉(zhuǎn)90°,并比較快波型和慢波型的到達(dá)時(shí)間。
然后記錄三種波型的到達(dá)時(shí)間,通過(guò)計(jì)算求出相應(yīng)聲速。若有各向異性存在,操作者可先看到輕微的聲波雙折射。
這是由快橫波與慢橫波引起的。在各向異性較弱的試塊中,快橫波與慢橫波的到達(dá)時(shí)間差可能看不出來(lái)。

(圖4 校驗(yàn)各向異性的探頭位置)
置1、2、3(或3*)校驗(yàn)
4.3主要用法說(shuō)明
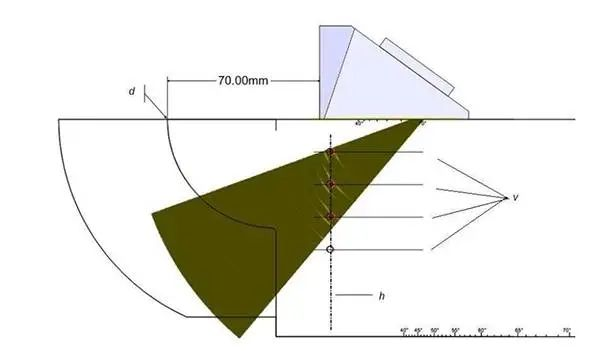
4.3.1斜探頭聲束角度測(cè)定
應(yīng)先設(shè)置好要測(cè)評(píng)的斜探頭聲束延時(shí)法則。
再將斜探頭放在試塊上,使R100mm圓弧面回波最大,測(cè)出探頭入射點(diǎn)。
用尖細(xì)的標(biāo)記筆,在探頭楔塊上劃出一線,使之與R100mm圓弧面中心點(diǎn)相符。
隨后,探頭移動(dòng),使最高或最低位置的3mm橫孔反射回波最大,見(jiàn)圖5。按最接近0.5°的刻度,讀出試塊標(biāo)記線上指示的角度值,以此確定探頭可讀出的實(shí)際折射角。

 a
a(圖5)
4.3.2探頭陣元配置顯示用延時(shí)法則獲取的B掃圖,觀測(cè)陣列中每一單元的底波信號(hào)幅度和時(shí)間。
若1#陣元離PAUT校驗(yàn)試塊端部最近,則其脈沖回波到達(dá)時(shí)間最短,而所有隨后陣元的脈沖回波到達(dá)時(shí)間顯示,應(yīng)依次單調(diào)增加。
圖6即表示64陣元探頭由試塊V形面所得響應(yīng)的B掃圖顯示。每一陣元的響應(yīng)時(shí)間略大于相鄰陣元,即表明陣元配置正確。

(圖6 測(cè)評(píng)陣元配置的探頭放置和相應(yīng)B掃圖)
注意:文中若涉及標(biāo)準(zhǔn)均可能存在失效,因此本文僅做學(xué)習(xí)參考,若有錯(cuò)誤,請(qǐng)留言指正,也希望這些知識(shí)點(diǎn)可以幫到你!
分享到:

標(biāo)準(zhǔn)與中國(guó)標(biāo)準(zhǔn)對(duì)比多了些什么")
